Not all rehabilitation technology is created equal.
Only about 2% of rehabilitation therapists in North America currently use any robot-assisted gait device — and the primary reasons are consistent across every survey: too expensive, insufficient evidence, too hard to use (Yao et al., 2021). Kickstart™ was designed as a direct answer to all three of those barriers.
Kickstart™ vs. powered exoskeletons.
Powered exoskeletons like the Lokomat are effective in research settings — but they cost hundreds of thousands of dollars, require extensive operator training, cannot leave the facility, and demand significant floor space and infrastructure. They exist at well-funded academic centres and are unavailable to the community hospitals where most stroke patients receive care.
Kickstart™ is the alternative the market has been waiting for.
| Kickstart™ | Powered Exoskeletons | |
|---|---|---|
| Power Source | None — fully passive | Electric motors, batteries |
| Cost | Contact Us | $150,000–$350,000+ |
| Don & Doff Time | Under 5 minutes | 15–30+ minutes |
| Training Required | 1-hour demonstration | Multi-day certification |
| Portability | Fully portable | Fixed or semi-fixed |
| Maintenance | Minimal | High — electronics, software |
| Published Evidence | 4 peer-reviewed studies | Varies; often academic-centre only |
| Community Hospital Ready | ✓ Yes | ✕ Rarely |

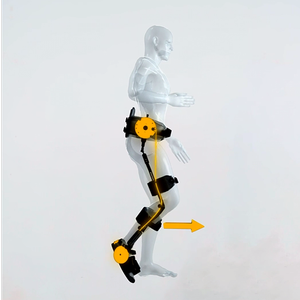
How Exotendon™ technology works.
The Kickstart™ Walk Assist System consists of three components: a waist belt, an external support structure that runs along the lateral side of the leg, and the Exotendon™ — an elastic cable that passes through pulleys positioned at the hip, knee, and ankle.
The mechanism is inspired by the anatomy of the horse’s hindlimb, where long tendons spanning multiple joints stretch and store energy during the stance phase of gait, then release that stored energy to initiate the swing phase — reducing the muscular work required to lift and advance the limb.
In the human clinical application, this means:
• During stance phase: the Exotendon™ stretches as the hip extends, storing elastic energy
• During swing phase: stored energy is released, assisting hip flexion and helping the affected limb clear the ground
• Net effect: reduced double support time, improved weight-bearing symmetry, decreased muscular demand on the hemiparetic side
The tension is adjusted per patient via a ratchet dial at the waist belt — tightened until the patient reports the assist and can clear the foot during walking. No electronics, no programming, no algorithms.